

TUTORIAL ESERCIZIO – Pagine Web View of Things (VoT) WinCC Unified NOVITA’ di TIA Portal v17 con S7-1500 fw 2.9
Creazione Pagine Web View of Things (VoT) WinCC Unified in TIA Portal v17 con S7-1500 firmware 2.9
TUTORIAL ESERCIZIO – Invio ricezione messaggi da PLC S7-1200 S7-1500 verso bot Telegram con libreria LHTTP TiaPortal V17
Invio ricezione messaggi da PLC S7-1200 S7-1500 verso bot Telegram con libreria LHTTP TiaPortal V17
F.A.Q. – Che cosa sono e differenze tra PLC, DCS e Scada?
F.A.Q. – Che cosa sono e differenze tra PLC, DCS e Scada?
Con il TIA Portal Project Upgrader è possibile aggiornare i progetti di TIA Portal alla versione attuale di TIA Portal (ad es. da V15 a V17)
Con il TIA Portal Project Upgrader è possibile aggiornare i progetti di TIA Portal alla versione attuale di TIA Portal (ad es. da V15 a V17)
Il tool aggiorna tutti i progetti TIA Portal di una cartella e li salva in una cartella separata. I progetti aggiornati possono anche essere archiviati come archivio (.zap).
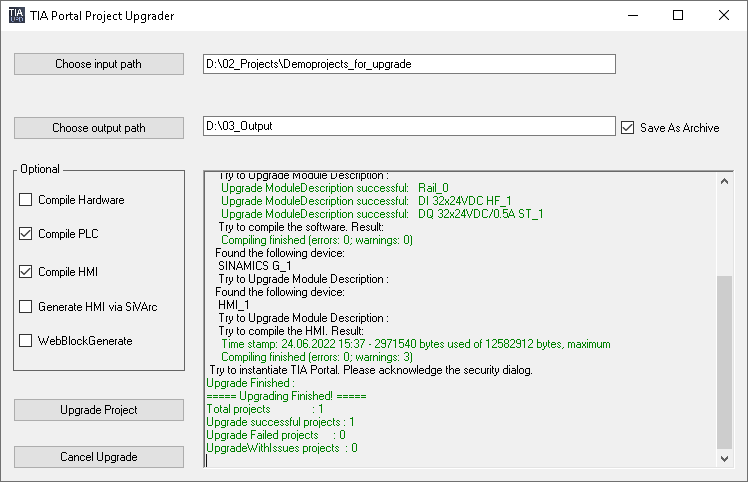
Presupposti
Per utilizzare il TIA Portal Project Upgrader, devono essere installati SIMATIC STEP 7 V17 o WinCC V17 e TIA Portal Openness.
Benefici
- Aggiorna automaticamente la versione del tuo progetto TIA Portal
- È possibile eseguire l’aggiornamento batch del progetto
- Compila automaticamente il progetto dopo l’aggiornamento del progetto
- Un registro di aggiornamento mostra lo stato
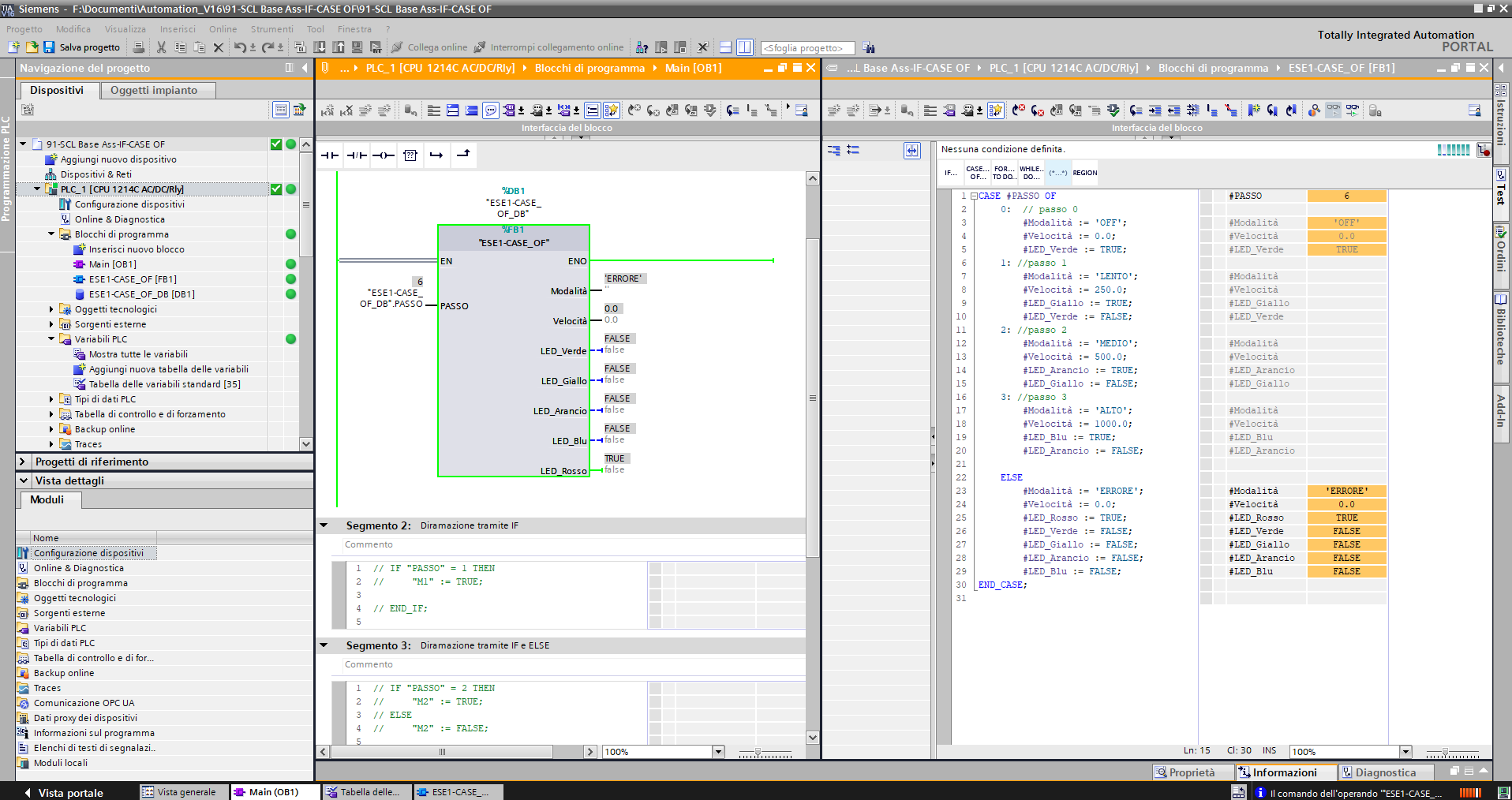
CORSO SCL0 Tia Portal Assegnazioni – diramazioni IF – ELSE – CASE…OF in SCL su PLC S7-1200
In questo un nuovo tutorial vedremo le operazioni di assegnazioni di valori semplici, di valori multiple e di valori combinate.
Vedremo la diramazione IF ELSE e la diramazione multipla CASE…OF con, successivamente, un esempio applicativo in un FB con DB di istanza.
TUTORIAL ESERCIZIO – Tia Portal V17 nuovo linguaggio CEM – Programmazione avviamento stella triangolo di un motore
TUTORIAL ESERCIZIO – Tia Portal V17 nuovo linguaggio CEM – Programmazione avviamento stella triangolo di un motore
ITS Lombardia Meccatronica – Iscriviti e Diventa “Tecnico superiore per l’automazione e la gestione dell’industria di processo”
ITS Lombardia Meccatronica – Iscriviti e Diventa “Tecnico superiore per l’automazione e la gestione dell’industria di processo”.
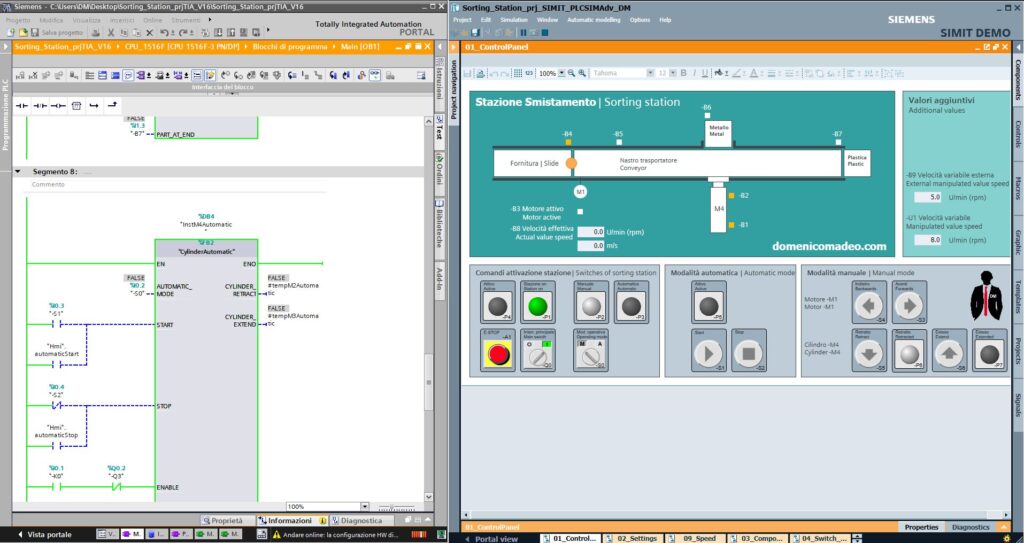
Esempio applicativo: Virtual Commissioning – Impianto di smistamento Metallo Plastica con Tia Portal, SIMIT e PLCSIM adv
In questo video, vediamo un esempio applicativo di Virtual Commissioning per testare una stazione di smistamento automatizzata per smistare componenti in metallo e plastica su nastro trasportatore, porgrammata da Tia Portal su una CPU S7-1500, insieme alla simulazione del processo in SIMIT (accoppiamento a PLCSIM Advanced tramite TCP/IP).
Software necessari:
Download Tia Portal V17: da qui
Download S7-PLCSIM Advanced V4.0: da qui
Download SIMIT V10.3: da qui
versioni trial.
Ricordo che per essere abilitati al download del software è necessaria una registrazione al sito di supporto Siemens (qui) ed una successiva autorizzazione da parte di Siemens, che può richiedere anche diversi giorni.
