

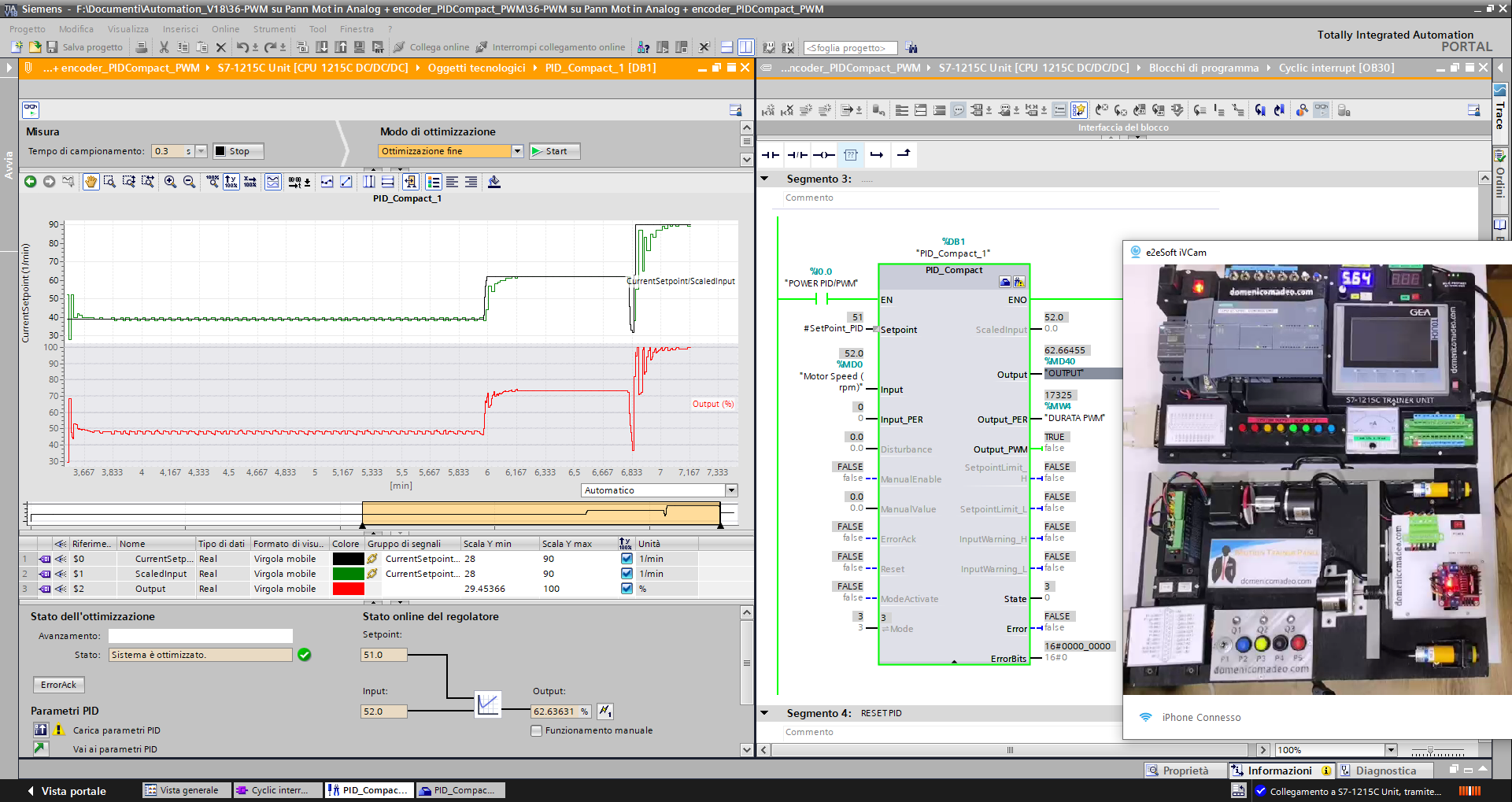
In questo esercizio, programmeremo la possibilità di variare la velocità di un motore DC con uscita PWM del PID, mediante la variazione di un ingresso analogico 0-10V. Inoltre andremo a calcolare in SCL la velocità in RPM mediante la lettura di un encoder incrementale.
In questo esercizio, programmeremo la possibilità di variare la velocità di un motore DC con uscita PWM del PID, mediante la variazione di un ingresso analogico 0-10V che ci farà da SETPOINT del controllore PID_Compact e andremo a calcolare in SCL la velocità in RPM mediante la lettura di un encoder incrementale configurato in conteggio in frequenza.
")



