

NB. SE NON VEDI CORRETTAMENTE IL VIDEO, APRILO SU YOUTUBE AL LINK:
📚 👉🏻👉🏻👉🏻 https://youtu.be/Yyo2Fh1GWgE
Home Corsi Corso ABB Robot Studio ESE02 Coll – Come creare un controller template in RobotStudio per lo...
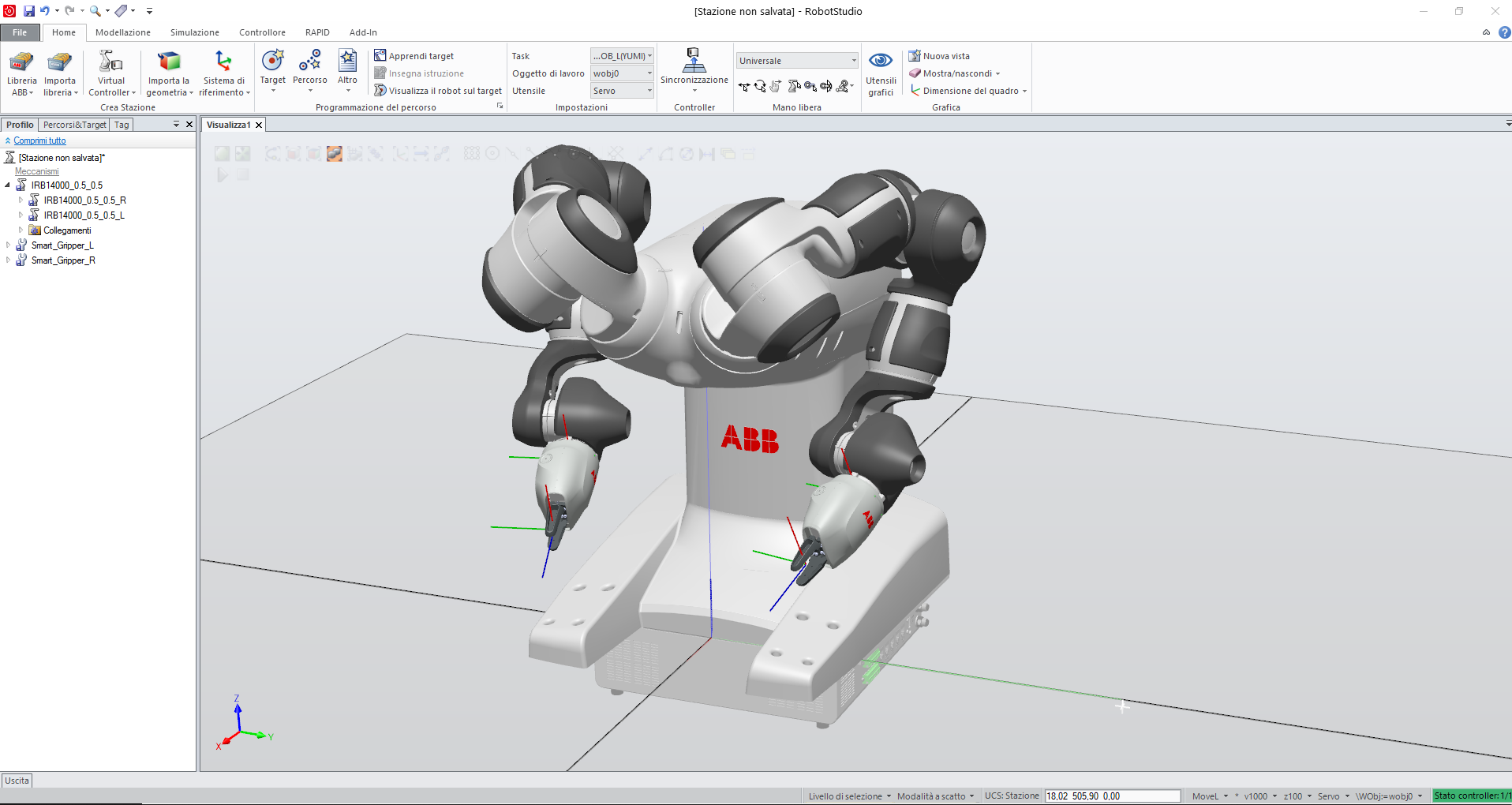
ESE02 Coll – Come creare un controller template in RobotStudio per lo YUMI ABB IRB14000 e Smart_Gripper_Servo



Segui il mio Canale Youtube

