

Connessione Profinet tra ABB IRB120 con Siemens PLC S7-1512c e HMI TP1200 Comfort, programmati con Tia Portal e RobotStudio in RAPID.
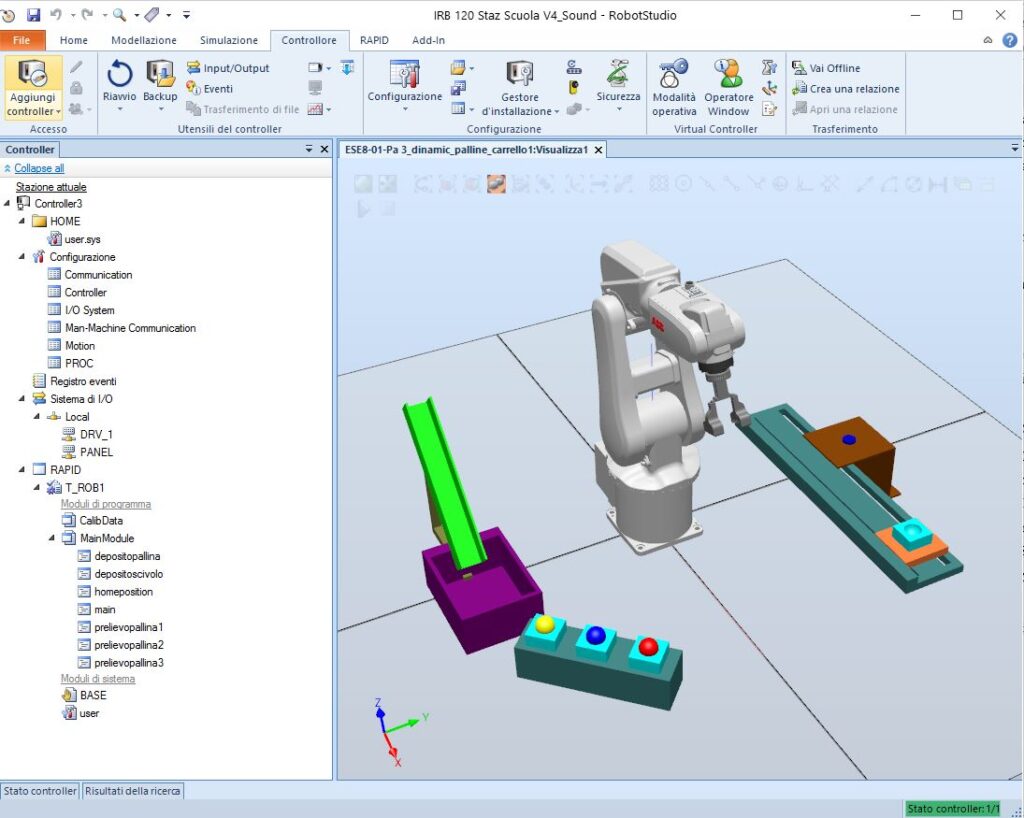
In questo video propongo un progetto di lavorazione di una stazione con il robot industriale ABB IRB 120 programmato in RAPID con RobotStudio.
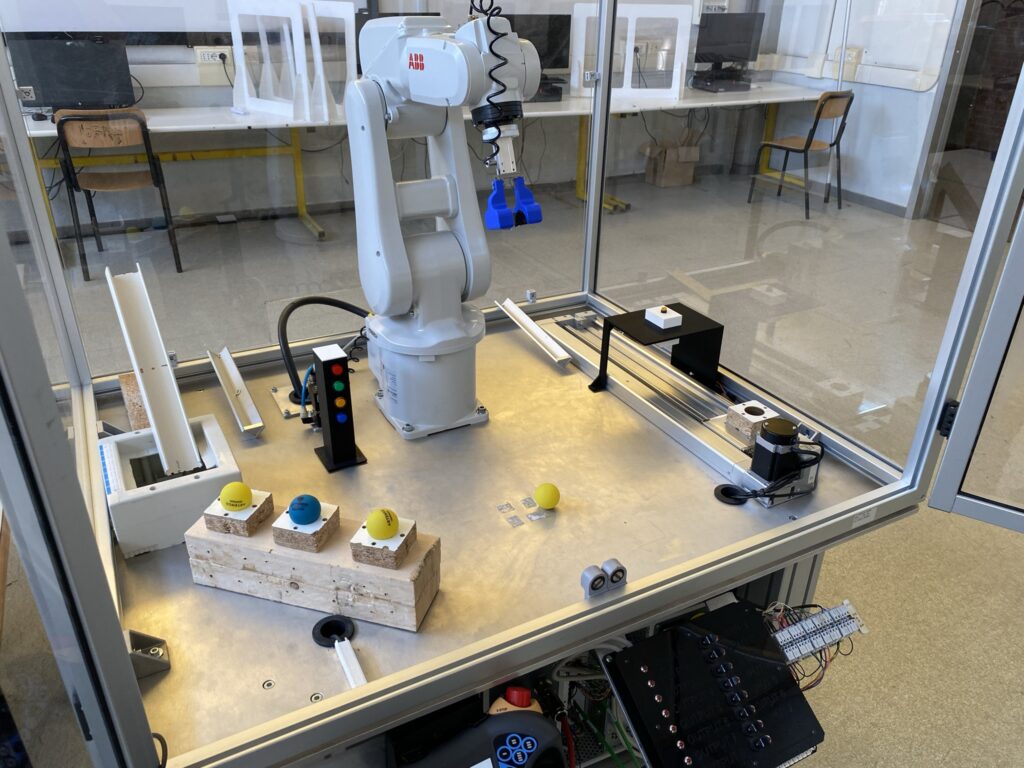
La stazione è arredata con una zona di prelievo 3 palline, che vengono posizionate su un nastro a 3 posizioni, nella posizione centrale viene simulata una stazione di lavorazione mediante segnale luminoso e sonoro, ultimata la lavorazione il robot preleva la pallina e la deposita su uno scivolo di stoccaggio prodotti lavorati.
Mediante controllo PLC e HMI è possibile comandare alla stazione di lavorazione se attivare i cicli singoli di ciascuna pallina, il ciclo completo di lavorazione di tutte e 3 le palline, tornare in posizione di Home, aprire e chiudere la pinza, oppura mandare in blocco di emergenza il sistema, simulando un blocco di sicurezza. Solo l’intervento dell’operatore potrà correggere l’errore e rimettere in esercizio il sistema.


SOFTWARE:
Per info e formazione su questo argomento, contattatemi tramite questa pagina.
")



