

TIA Portal (V17 V16 V15) – Link Download Support Package per il catalogo hardware Siemens – (HSP)
Come scaricare i Support Package per il catalogo hardware Siemens nel TIA Portal (V17 V16 V15) – (HSP)
TUTORIAL ESERCIZIO – MC1 MotionControl in Tia Portal Virtual commissioning due PositioningAxis oggetto tecn Cinematica
TUTORIAL ESERCIZIO – MC1 MotionControl in Tia Portal Virtual commissioning due PositioningAxis oggetto tecn Cinematica
Parte 1 Configurazione assi e messa in servizio iniziale
https://www.domenicomadeo.com/?p=5724
Parte 2 Programmazione Blocchi Motion Control
https://www.domenicomadeo.com/?p=5739
Parte 3 Programmazione HMI
https://www.domenicomadeo.com/?p=5742
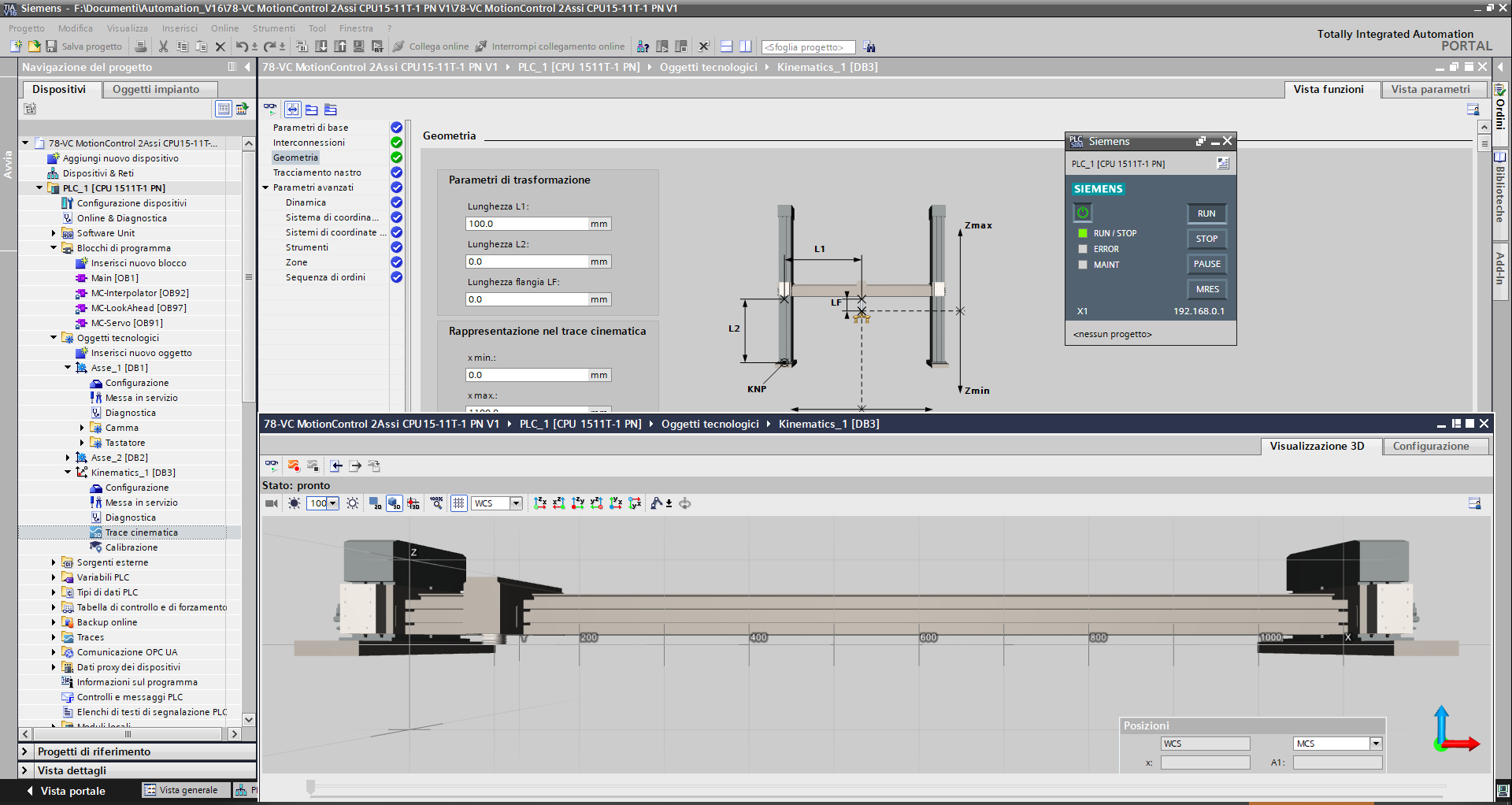
In questo Esercizio, vediamo come configurare due oggetti tecnologici di tipo Assi di posizione (TO_PositioningAxis) e un oggetto tecnologico di tipo “Cinematica” (TO_Kinematics) con una CPU Tecnologica di modello 1511T-1 PN e li metteremo in Virtual Commissioning su Tia Portal con PLCSim, testando la messa in servizio senza programmazione.
Descrizione oggetto tecnologico di tipo “Asse di posizionamento” (TO_PositioningAxis):
L’oggetto tecnologico “Asse di posizionamento” (TO_PositioningAxis) rappresenta un azionamento fisico nel controllore.
Con le istruzioni PLCopen Motion Control è possibile trasmettere all’azionamento ordini di posizionamento dal programma utente.
Nota: l’utilizzo di oggetti tecnologici influenza il comportamento temporale di altri livelli esecutivi della CPU, compreso quello del programma F.
Descrizione oggetto tecnologico di tipo “Cinematica” (TO_Kinematics):
In presenza di un movimento vettoriale l’oggetto tecnologico “Cinematica” (TO_Kinematics) assume il comando e il coordinamento degli assi appartenenti alla cinematica.
Comprende le funzionalità necessarie per predefinire e per eseguire i movimenti della cinematica.
Nota: l’utilizzo di oggetti tecnologici influenza il comportamento temporale di altri livelli esecutivi della CPU, compreso quello del programma F.
Software necessari:
Download Tia Portal V17: da qui
trial operativa 21 giorni.
Ricordo che per essere abilitati al download del software è necessaria una registrazione al sito di supporto Siemens (qui) ed una successiva autorizzazione da parte di Siemens, che può richiedere anche diversi giorni.
TIA Portal V18 – data di rilascio e novità, scarica le slide dell’annuncio all’SPS 2022
TIA Portal V18 – data di rilascio e novità, scarica le slide dell’annuncio all’SPS 2022
Siemens – Campionati Automazione Siemens (ex OlimpiadiAutomazione Siemens) – Al via ISCRIZIONI per ITIS, IPSIA, Licei, CFP e ITS
Siemens – Campionati Automazione Siemens (ex OlimpiadiAutomazione Siemens) – SCADENZA ISCRIZIONI: 13 GENNAIO 2023 ! per ITIS, IPSIA, Licei, CFP e ITS
parte ufficialmente l’avventura dei Campionati Automazione Siemens 2023 (ex OlimpiadiAutomazione Siemens).
E’ cambiato il nome ma non lo spirito e l’entusiasmo che ci spinge a proporre per la XIV volta questa fantastica competizione Nazionale dell’Automazione targata Siemens !!!
QUI potete scaricare il nuovo Bando riservato a docenti e studenti delle classi quarte e quinte delle Scuole Secondarie di Secondo Grado e delle Classi prime o seconde degli Istituti Tecnici Superiori (ITS).
Come gli altri anni, i gruppi di lavoro saranno chiamati a realizzare un reale progetto di Automazione nell’ambito dei processi industriali, dei processi legati a temi di sostenibilità ambientale, sociale e urbana.
Confermati i premi rispettivamente per i primi tre Classificati nella Categoria Junior e Senior, il Premio Comunicazione e il Premio Regione
Per iscriversi sarà sufficiente accedere alla pagina Registrazione Campionato di Automazione Siemens 2023 | Campionati di Automazione | Siemens Italy
e cliccare al Form di Registrazione sul bottone dedicato. Si verrà quindi indirizzati alla pagina di registrazione, dove potrete compilare il form seguendo le istruzioni lì presenti
Termine chiusura delle iscrizioni: 13 gennaio 2023
Caratteristiche del progetto
Viene proposta la realizzazione di un progetto di Automazione reale creato obbligatoriamente utilizzando il software Siemens TIA PORTAL e con l’impiego di PLC SIMATIC S7-1200 o SIMATIC S7-1500 o ET200SP OPEN CONTROLLER (vedere in appendice “caratteristiche del progetto”), collegati preferibilmente in rete con una apparecchiatura di supervisione HMI o con un Drive (o con entrambe).
Il progetto potrà essere realizzato in modo virtuale, con l’impiego del software Siemens TIA
PORTAL testato con il tool di simulazione PLCSIM ed eventualmente integrato con gli altri
sw di Simulazione Siemens (PLCSIM Advanced 2.0, Solid Edge, NX MCD, SIMIT).
In più quest’anno c’è una importante novità
La società Randstad – multinazionale che si occupa di ricerca, selezione e formazione di risorse umane – offre agli Istituti che decideranno di aderire ai Campionati Automazione Siemens l’opportunità di partecipare ad un percorso volto a trasferire competenze relative al personal branding e public speaking per favorire le conoscenze e le tecniche necessarie per incanalare la propria professionalità in modo efficace e vincente.
L’obiettivo è supportare i ragazzi nell’esposizione dei loro elaborati che presenteranno nella fase finale della Competizione.
Il percorso sarà articolato in 14 ore e sarà completamente gratuito per i beneficiari
I gruppi di lavoro che scegliessero di aderire a questa iniziativa, possono contattare direttamente education@randstad.it entro max il 13 Gennaio 2023
F.A.Q. – Perché meglio utilizzare il segnale di corrente 4-20 mA anziché il segnale di tensione in un ingresso analogico del PLC?
F.A.Q. – Perché meglio utilizzare il segnale di corrente 4-20 mA anziché il segnale di tensione in un ingresso analogico del PLC?
TIA Portal V18 – 08/12/2022 Iscriviti al Webinar Siemens UK di presentazione
Scopri i punti di forza del webinar TIA Portal v18 – Sempre pronto per il domani!
TIA Portal acquisisce costantemente nuove funzioni e si arricchisce di tecnologie entusiasmanti. Partecipa al webinar per saperne di più!
Dates: 8th December 2022 Time: 10:00-11:00 GMT (London) Language: English
Nei mercati volatili nuove tendenze e requisiti sorgono più velocemente e durano meno. Per adattarsi rapidamente ai cambiamenti e soddisfare tali requisiti, l’ingegneria deve essere più veloce che mai. Guadagnare efficienza nell’ingegneria dell’automazione è la più grande leva per ridurre il time-to-market. Riconosci queste sfide?
Quale valore può apportare alla mia azienda il nuovo TIA Portal v18?
• Ridurre il time-to-market grazie a tempi di progettazione più brevi
• Garantire la massima qualità del software con test e simulazione integrati
• La modularizzazione potenziata migliora il riutilizzo di moduli software collaudati e la manutenzione del software
• Sviluppo software agile per adattarsi rapidamente alle mutevoli esigenze
• Soddisfare gli standard di sicurezza internazionali
Se vuoi saperne di più sul nuovo TIA Portal v18
