

In questo video vediamo come realizzare un Meccanosmo Slitta con 4 posizioni e in seguito lo Smart Component per poter avviare in Logica della Stazione l’input alle varie posizioni usando le Output del controllore IRC5 del robot IRB14000 direttamente o da ambiente grafico o da codice RAPID.
Guarda la DEMO https://youtu.be/A-oBUBGcZPc
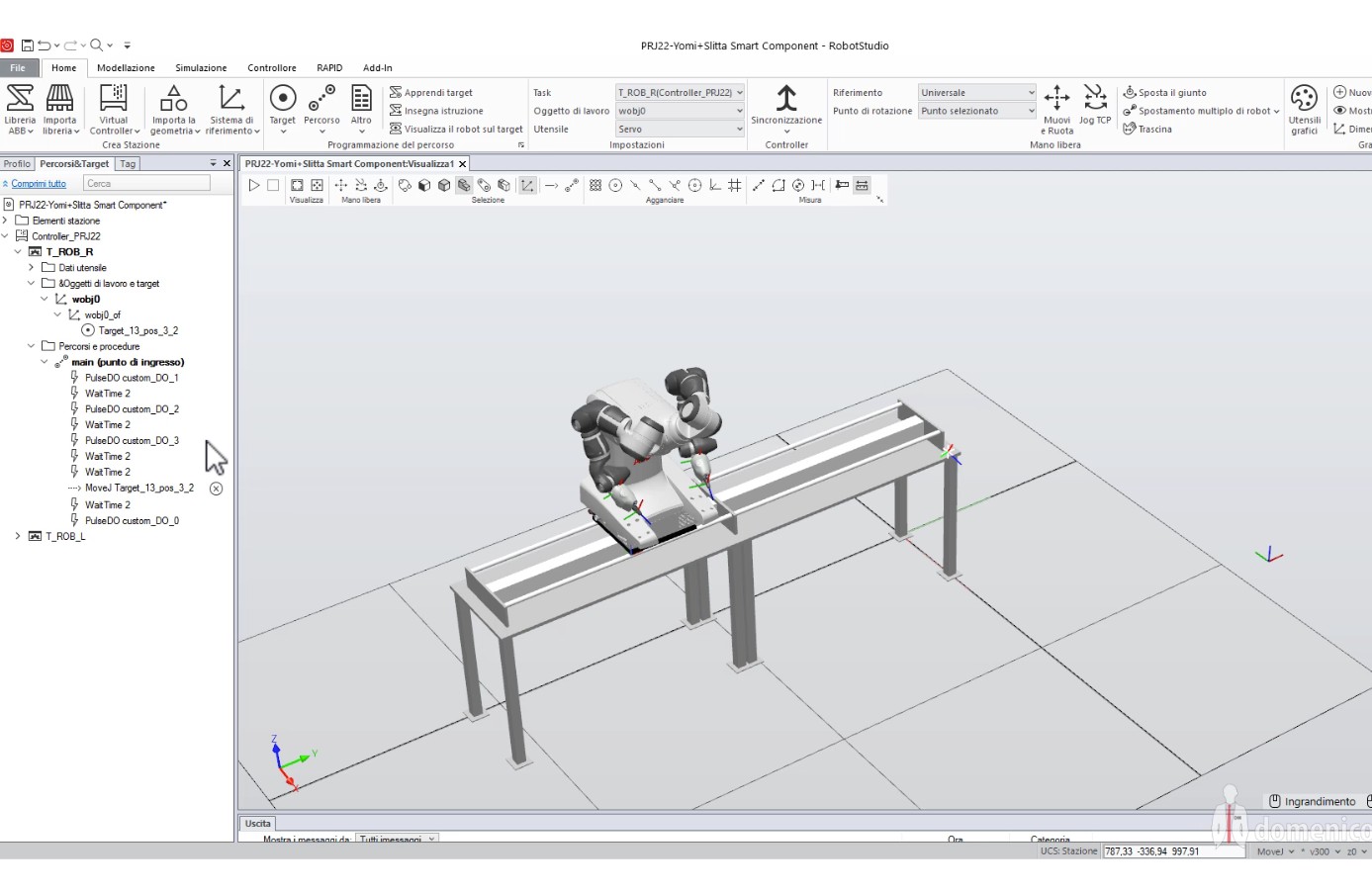
Progetto completo e simulazione in RobotStudio.
Buon lavoro!




